Difference between revisions of "Turtlebot3 Burger SBC Foxy Bringup Processes 20210303"
From wikidb
(→Notes and Logs) |
|||
| Line 29: | Line 29: | ||
Created file turtlebot3_burger.pdf | Created file turtlebot3_burger.pdf | ||
| − | This is the turtlebot3_burger.pdf | + | This is the resulting turtlebot3_burger.pdf graph. |
[[File:turtlebot3_burger.pdf | 800px]] | [[File:turtlebot3_burger.pdf | 800px]] | ||
= System Integration Parameters = | = System Integration Parameters = | ||
| + | |||
| + | A set of parameters passed to the turtlebot3_node extablish, for example, physical characteristics of the Burger (wheel diameters and separation) and link the URDF frames to odometry. The parameter files is located here on the SBC: | ||
| + | ~/turtlebot3_ws/install/turtlebot3_bringup/share/turtlebot3_bringup/param/burger.yaml | ||
| + | The file is copied here: | ||
[[Turblebot3 Burger Foxy Turtlebot3_node Parmaters 20210303]] | [[Turblebot3 Burger Foxy Turtlebot3_node Parmaters 20210303]] | ||
Revision as of 11:32, 4 March 2021
Contents
Process Running on the RPi
The ROS2 nodes created by bringup on the SBC (RPi). This is the rqt_graph representation

The processes created in the RPi. These are the execute commands.
ps -au
/usr/bin/python3 /opt/ros/foxy/bin/ros2 launch turtlebot3_bringup robot.launch.py
/opt/ros/foxy/lib/robot_state_publisher/robot_state_publisher
/home/ubuntu/turtlebot3_ws/install/turtlebot3_description/share/turtlebot3_description/urdf/turtlebot3_burger.urdf
--ros-args -r __node:=robot_state_publisher
--params-file /tmp/launch_params_a7lmxzoy
/opt/ros/foxy/lib/hls_lfcd_lds_driver/hlds_laser_publisher
--ros-args -r __node:=hlds_laser_publisher -r __node:=hlds_laser_publisher
--params-file /tmp/launch_params_b55p9bi2
/home/ubuntu/turtlebot3_ws/install/turtlebot3_node/lib/turtlebot3_node/turtlebot3_ros -i /dev/ttyACM0
--ros-args
--params-file /home/ubuntu/turtlebot3_ws/install/turtlebot3_bringup/share/turtlebot3_bringup/param/burger.yaml
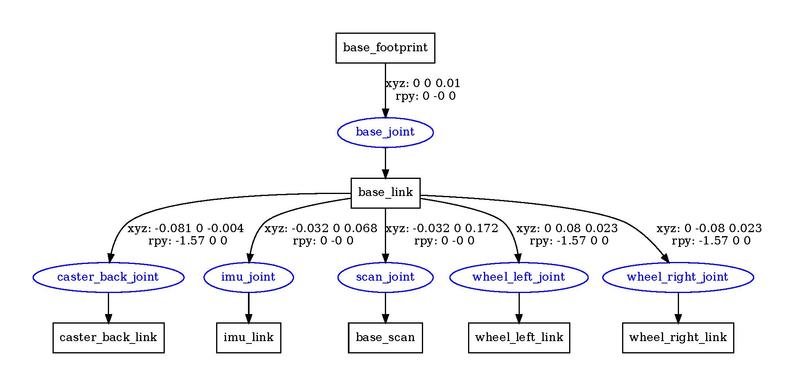
Burger URDF
This is a graphical representation of the Burger URDF. The URDF is one of the parameters of the robot_state_publisher above located at:
~/turtlebot3_ws/install/turtlebot3_description/share/turtlebot3_description/urdf/turtlebot3_burger.urdf
$ urdf_to_graphiz turtlebot3_burger.urdf
Created file turtlebot3_burger.gv
Created file turtlebot3_burger.pdf
This is the resulting turtlebot3_burger.pdf graph.
System Integration Parameters
A set of parameters passed to the turtlebot3_node extablish, for example, physical characteristics of the Burger (wheel diameters and separation) and link the URDF frames to odometry. The parameter files is located here on the SBC:
~/turtlebot3_ws/install/turtlebot3_bringup/share/turtlebot3_bringup/param/burger.yaml
The file is copied here:
Turblebot3 Burger Foxy Turtlebot3_node Parmaters 20210303