Setting up the ROS Transforms
Contents
References
- ROS tf
- Coordinate Frames
- Tutorials
- TF Setup
- Transform Map to Odom
- Transform Odom to Base
- Yehoshr's Lecture 6
Base_link to Laser
cat tf_laser.launch
<launch>
<node pkg="tf" type="static_transform_publisher" name="base_to_laser"
args="0.202 0 0.111 0 0 0 1 base_link neato_laser 100" />
</launch>
See floor_hugger.urdf URDF Representation of Floor Hugger
base_link => extended_base => Laser_layer => laser_sensor x = 0.004 + 0.000 + 0.192 + 0.006 = 0.202 z = 0.021 + 0.018 + 0.011 + 0.061 = 0.111
This neato_laser reference needs to be the same as the reference in costmap_common_params.yaml. See Navigation Tuning#laser_link.
The static_transform_publisher arguments are defined at ROS TF. Offset is in linear meters and angular quaternions.
static_transform_publisher x y z qx qy qz qw frame_id child_frame_id period_in_ms
Odom to Base_link
TBD: Where is this specified? In Odometry?
Map to Odom
cat tf_map.launch
<launch>
<node pkg="tf" type="static_transform_publisher" name="odom_to_map"
args="0 0 0.045 0 0 0 1.0 map odom 100" />
</launch>
Wheel radius is 45 mm. Calibrate_Phidgets_Odometry#From_Specs
Setup
Terminal 1
roscore
Terminal 2
roslaunch floor_hugger nav.launch
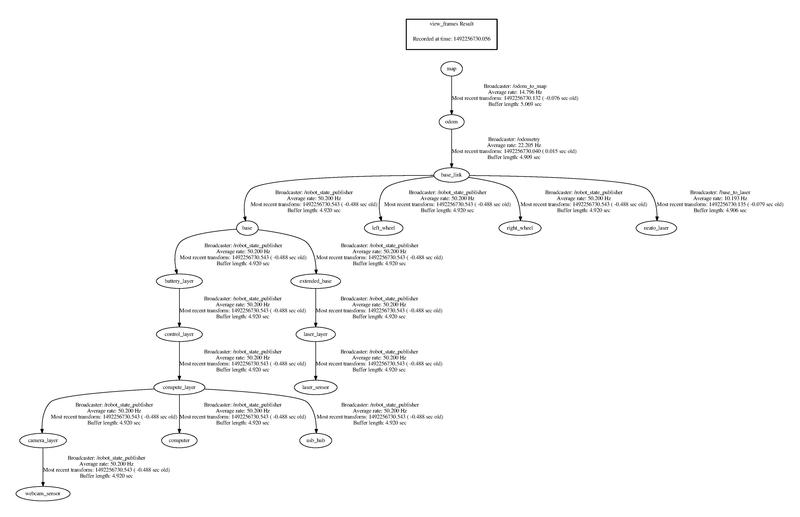
Display Tree
Terminal 3
rosrun tf view_frames evince frames.pdf

Exploration Tools
monitor
Monitor the transforms between frames. See complete tree below. See URDF Representation of Floor Hugger for the robot transform definitions.
rosrun tf tf_monitor
All Broadcasters:
Node: unknown_publisher 96.979 Hz, Average Delay: -0.260119 Max Delay: 0.102549
RESULTS: for all Frames
Frames:
Frame: base published by unknown_publisher Average Delay: -0.474372 Max Delay: 0
Frame: base_link published by unknown_publisher Average Delay: 0.000405951 Max Delay: 0.00156847
Frame: battery_layer published by unknown_publisher Average Delay: -0.474377 Max Delay: 0
Frame: camera_layer published by unknown_publisher Average Delay: -0.474374 Max Delay: 0
Frame: compute_layer published by unknown_publisher Average Delay: -0.474374 Max Delay: 0
Frame: computer published by unknown_publisher Average Delay: -0.474373 Max Delay: 0
Frame: control_layer published by unknown_publisher Average Delay: -0.474377 Max Delay: 0
Frame: extended_base published by unknown_publisher Average Delay: -0.474378 Max Delay: 0
Frame: laser_layer published by unknown_publisher Average Delay: -0.474373 Max Delay: 0
Frame: laser_sensor published by unknown_publisher Average Delay: -0.474372 Max Delay: 0
Frame: left_wheel published by unknown_publisher Average Delay: -0.474379 Max Delay: 0
Frame: neato_laser published by unknown_publisher Average Delay: -0.0996256 Max Delay: 0
Frame: odom published by unknown_publisher Average Delay: -0.0327469 Max Delay: 0.104149
Frame: right_wheel published by unknown_publisher Average Delay: -0.474377 Max Delay: 0
Frame: usb_hub published by unknown_publisher Average Delay: -0.474375 Max Delay: 0
Frame: webcam_sensor published by unknown_publisher Average Delay: -0.474375 Max Delay: 0
map to odom transform
See tf_map.launch script above to confirm the z value below
rosrun tf tf_echo map odom
At time 1492259778.541
- Translation: [0.000, 0.000, 0.045]
- Rotation: in Quaternion [0.000, 0.000, 0.000, 1.000]
in RPY (radian) [0.000, -0.000, 0.000]
in RPY (degree) [0.000, -0.000, 0.000]
odom to base_link
The odom to base_link transform in all zeros at startup.
rosrun tf tf_echo odom base_link
At time 1492260129.428
- Translation: [0.000, 0.000, 0.000]
- Rotation: in Quaternion [0.000, 0.000, 0.000, 1.000]
in RPY (radian) [0.000, -0.000, 0.000]
in RPY (degree) [0.000, -0.000, 0.000]
odom to base_link after move
The odom to base_link transform changes after the robot moves.
rostopic pub -1 /cmd_vel geometry_msgs/Twist '[5,0,0]' '[0,0,0]'
rosrun tf tf_echo odom base_link
At time 1492261296.158
- Translation: [0.365, -0.062, 0.000]
- Rotation: in Quaternion [0.000, 0.000, -0.066, 0.998]
in RPY (radian) [0.000, 0.000, -0.132]
in RPY (degree) [0.000, 0.000, -7.546]
It reflects the same values as odometry.
rostopic echo odom
...
pose:
pose:
position:
x: 0.364562615458
y: -0.0618304999521
z: 0.0
orientation:
x: 0.0
y: 0.0
z: -0.0658021751817
w: 0.997832688251
...
base_link to neato_laser
See tf_laser.launch for how these were derived.
rosrun tf tf_echo base_link neato_laser
At time 1492260448.546
- Translation: [0.202, 0.000, 0.111]
- Rotation: in Quaternion [0.000, 0.000, 0.000, 1.000]
in RPY (radian) [0.000, -0.000, 0.000]
in RPY (degree) [0.000, -0.000, 0.000]
base_link to laser_sensor
This is derived from the URDF and is the same as the base_link to the neato_laser. So I wonder whether the tf_laser.launch script is redundant. They fortunately give the same results.
rosrun tf tf_echo base_link laser_sensor
At time 1492260747.860
- Translation: [0.202, 0.000, 0.111]
- Rotation: in Quaternion [0.000, 0.000, 0.000, 1.000]
in RPY (radian) [0.000, -0.000, 0.000]
in RPY (degree) [0.000, -0.000, 0.000]
Display Complete Tree
See URDF Representation of Floor Hugger. It is pulled in from the rviz_mapping.launch script. Notice that its transforms are published by the robot_state_publisher. See robot_state_publisher launch below and the floor_hugger.urdf parameter definition below.
cat rviz_mapping.launch
<launch>
<arg name="gui" default="False" />
<param name="robot_description" textfile="$(find floor_hugger)/model/floor_hugger.urdf" />
<param name="use_gui" value="$(arg gui)"/>
<node name="joint_state_publisher" pkg="joint_state_publisher" type="joint_state_publisher" />
<node name="robot_state_publisher" pkg="robot_state_publisher" type="state_publisher" />
<node name="rviz" pkg="rviz" type="rviz" args="-d $(find floor_hugger)/config/active_mapping.rviz" required="true" />
</launch>
Initial Test
Terminal 1
roscore
Terminal 2
Set sim time to false in case it was set to true during gmapping.
rosparam set use_sim_time false roslaunch floor_hugger odometry.launch
Terminal 3
rosrun xv_11_laser_driver neato_laser_publisher _port:=/dev/ttyUSB0 _firmware_version:=2
Terminal 4
roslaunch floor_hugger tf_laser.launch
Terminal 5
roslaunch floor_hugger tf_map.launch
Terminal 6
rosrun tf view_frames evince frames.pdf
Result is a file named frames.pdf.
