Turtlebot3 Burger SBC Foxy Bringup Processes 20210303
Contents
Process Running on the RPi
The ROS2 nodes created by bringup on the SBC (RPi). This is the rqt_graph representation

The processes created in the RPi. These are the execute commands.
ps -au
/usr/bin/python3 /opt/ros/foxy/bin/ros2 launch turtlebot3_bringup robot.launch.py
/opt/ros/foxy/lib/robot_state_publisher/robot_state_publisher
/home/ubuntu/turtlebot3_ws/install/turtlebot3_description/share/turtlebot3_description/urdf/turtlebot3_burger.urdf
--ros-args -r __node:=robot_state_publisher
--params-file /tmp/launch_params_a7lmxzoy
/opt/ros/foxy/lib/hls_lfcd_lds_driver/hlds_laser_publisher
--ros-args -r __node:=hlds_laser_publisher -r __node:=hlds_laser_publisher
--params-file /tmp/launch_params_b55p9bi2
/home/ubuntu/turtlebot3_ws/install/turtlebot3_node/lib/turtlebot3_node/turtlebot3_ros -i /dev/ttyACM0
--ros-args
--params-file /home/ubuntu/turtlebot3_ws/install/turtlebot3_bringup/share/turtlebot3_bringup/param/burger.yaml
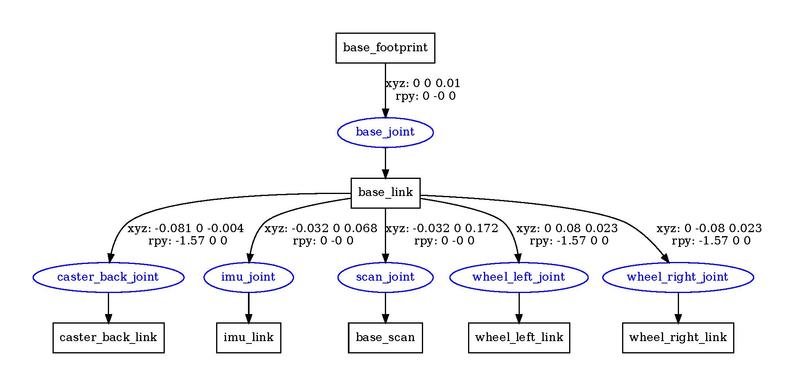
Burger URDF
This is a graphical representation of the Burger URDF. The URDF is one of the parameters of the robot_state_publisher above located at:
~/turtlebot3_ws/install/turtlebot3_description/share/turtlebot3_description/urdf/turtlebot3_burger.urdf
$ urdf_to_graphiz turtlebot3_burger.urdf
Created file turtlebot3_burger.gv
Created file turtlebot3_burger.pdf
This is the resulting turtlebot3_burger.pdf graph.
Reference
TBD
- See Hood_NUC_URDF_202011
- Display a 3D representation of Burger
System Integration Parameters
A set of parameters passed to the turtlebot3_node extablish, for example, physical characteristics of the Burger (wheel diameters and separation) and link the URDF frames to odometry. The parameter files is located here on the SBC:
~/turtlebot3_ws/install/turtlebot3_bringup/share/turtlebot3_bringup/param/burger.yaml
The file is copied here: Turblebot3 Burger Foxy Turtlebot3_node Parameters 20210303
Note this declaration targeted at the diff_drive_controller which links the "odom" parent frame to its child "base_footprint". It is necessary so odometry information can be mapped to the location of the laser scanner's frame named "base_scan'. See
- Intel's Navigation2 tutorial Section 2.2 "Launch navigation2 on a Robot" for running RVIZ.
Make sure all transforms from odom are present. (odom->base_link->base_scan)
diff_drive_controller:
ros__parameters:
odometry:
publish_tf: true
use_imu: true
frame_id: "odom"
child_frame_id: "base_footprint"
TF: Transform Topics
Transform topics published by the robot_state_publisher can be captured by
$ ros2 topic echo tf
transforms:
- header:
stamp:
sec: 1614792208
nanosec: 280959974
frame_id: odom
child_frame_id: base_footprint
transform:
translation:
x: 0.13462753501481928
y: 3.9344604215855566e-05
z: 0.0
rotation:
x: 0.0
y: 0.0
z: 0.000571099078903287
w: 0.9999998369229077
---
$ ros2 topic echo tf_static
---
transforms:
- header:
stamp:
sec: 1614799211
nanosec: 126169544
frame_id: base_footprint
child_frame_id: base_link
transform:
translation:
x: 0.0
y: 0.0
z: 0.01
rotation:
x: 0.0
y: 0.0
z: 0.0
w: 1.0
- header:
stamp:
sec: 1614799211
nanosec: 126179909
frame_id: base_link
child_frame_id: caster_back_link
transform:
translation:
x: -0.081
y: 0.0
z: -0.004
rotation:
x: -0.706825181105366
y: 0.0
z: 0.0
w: 0.7073882691671998
- header:
stamp:
sec: 1614799211
nanosec: 126187096
frame_id: base_link
child_frame_id: imu_link
transform:
translation:
x: -0.032
y: 0.0
z: 0.068
rotation:
x: 0.0
y: 0.0
z: 0.0
w: 1.0
- header:
stamp:
sec: 1614799211
nanosec: 126190638
frame_id: base_link
child_frame_id: base_scan
transform:
translation:
x: -0.032
y: 0.0
z: 0.172
rotation:
x: 0.0
y: 0.0
z: 0.0
w: 1.0
---